Pinzas OnRobot para pick and place: caso Schneider
La automatización de tareas manuales no debe evaluarse únicamente por el aumento de la velocidad productiva. En procesos donde los operarios manipulan piezas de manera repetitiva, la seguridad, la ergonomía y la flexibilidad de la solución también son factores determinantes.
Este fue el enfoque adoptado por Schneider Electric en su planta de Meliana, Valencia, donde la compañía buscaba automatizar distintas operaciones de manipulación sin aislar al robot del equipo humano ni ocupar el espacio requerido por una celda robótica industrial tradicional.
La implementación combinó robótica colaborativa con las pinzas RG6 y VGC10 de OnRobot, permitiendo automatizar tareas de pick and place, manipulación de relés y carga de recipientes dentro de un entorno compartido con los operarios.
El desafío: automatizar sin perder flexibilidad
Uno de los procesos identificados por Schneider Electric se realizaba completamente de forma manual y presentaba una oportunidad para mejorar la productividad.
Sin embargo, la compañía no buscaba únicamente aumentar el volumen de producción. La solución también debía mejorar la ergonomía, reducir riesgos y adaptarse a las condiciones reales de la línea.
La robótica colaborativa ofrecía una ventaja concreta frente a una instalación tradicional: la posibilidad de trabajar en el mismo espacio que las personas, tras la correspondiente evaluación de riesgos, utilizando una infraestructura más compacta y flexible.
Esto resultaba especialmente importante en una planta donde el espacio disponible y la interacción con los operarios formaban parte del diseño cotidiano del proceso.
Primera aplicación: manipulación flexible con la pinza RG6
La primera solución se orientó a automatizar una operación de conformado de relés.
Equipada con una pinza RG6 de OnRobot, la aplicación toma los relés terminados y los traslada hacia la herramienta de conformado, completando una tarea que anteriormente se realizaba de manera manual.
La flexibilidad de la RG6 permite adaptar el agarre según las necesidades del proceso. En determinadas posiciones, el sistema puede manipular varios relés, mientras que en otras toma las piezas de forma individual para llevarlas a la estación correspondiente y entregarlas posteriormente al operario.
Esta capacidad permite combinar automatización y trabajo humano dentro de una misma secuencia, manteniendo la adaptabilidad que requiere una línea con diferentes condiciones de manipulación.
RG6: agarre adaptable para diferentes piezas
La RG6 es una pinza eléctrica de dos dedos y carrera amplia, diseñada para manipular piezas de diferentes tamaños y formas.
En aplicaciones de pick and place, su flexibilidad permite utilizar una misma herramienta para distintas referencias, reduciendo la necesidad de incorporar efectores finales específicos para cada producto.
Entre los beneficios aportados por esta solución se encuentran:
- Adaptación a diferentes dimensiones y geometrías.
- Programación e implementación simplificadas.
- Reducción de tareas repetitivas para los operarios.
- Mayor flexibilidad ante cambios en la producción.
- Integración con aplicaciones robóticas colaborativas.
En el caso de Schneider Electric, estas características permitieron automatizar la manipulación de relés sin eliminar la intervención del operador en las etapas donde su participación seguía aportando valor.
Segunda aplicación: dos pinzas en un mismo robot
Luego de implementar la primera solución, Schneider Electric abordó la automatización del final de una nueva línea productiva.
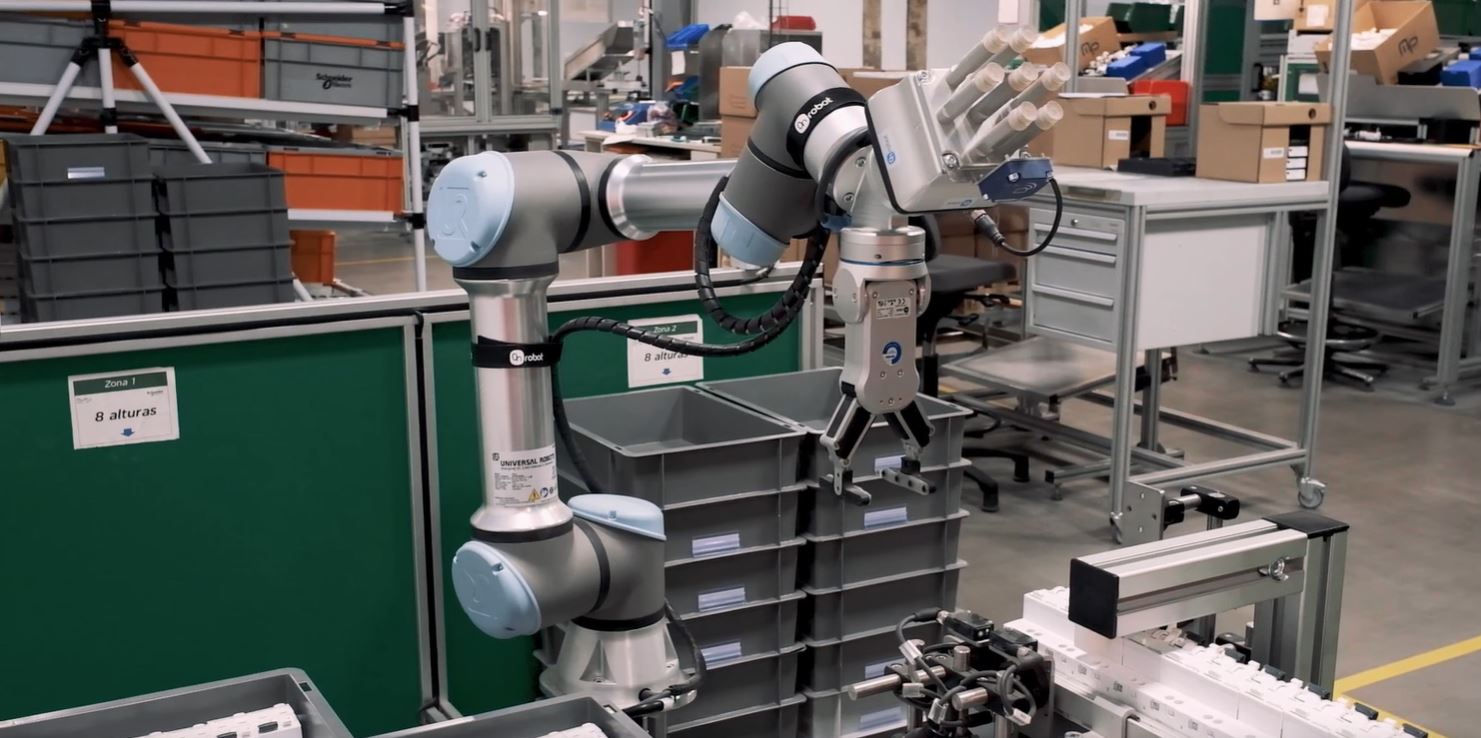
Esta aplicación debía cumplir dos funciones diferentes: tomar recipientes vacíos y llenarlos con los productos terminados. Para resolver ambas tareas sin incorporar dos robots independientes, se instalaron dos herramientas sobre el mismo brazo mediante un Dual Quick Changer.
La configuración integró:
- Una pinza de vacío eléctrica VGC10.
- Una pinza eléctrica RG6.
- Un sistema Dual Quick Changer para utilizar ambas herramientas.
- Un robot colaborativo trabajando dentro del espacio compartido.
La combinación permitió utilizar la VGC10 para tomar los recipientes desde el carro de transporte y ubicarlos en el área de trabajo. Luego, la RG6 manipula uno o dos dispositivos, los coloca dentro de la bandeja y ejecuta otras tareas, como descargar productos no reconocidos hacia la cinta de rechazo.
VGC10: vacío eléctrico sin aire comprimido
La VGC10 es una pinza de vacío eléctrica compacta y personalizable, pensada para aplicaciones donde el espacio disponible es limitado.
Una de sus principales ventajas es que incorpora su propio sistema de vacío y no necesita una fuente externa de aire comprimido. Esto simplifica la instalación y evita incorporar mangueras, compresores o infraestructura neumática adicional.
En la aplicación de Schneider Electric, esta característica contribuyó a reducir riesgos y facilitar la movilidad de la solución.
La VGC10 permite:
- Manipular objetos de distintas formas mediante ventosas configurables.
- Trabajar en espacios reducidos.
- Reducir costos asociados al suministro de aire comprimido.
- Simplificar el despliegue y la reubicación de la aplicación.
- Ejecutar acciones de toma y liberación con rapidez.
Su diseño compacto y su capacidad para manipular cargas de hasta 15 kg amplían las posibilidades de automatización en líneas donde una pinza de mayor tamaño podría resultar difícil de integrar.
Dual Quick Changer: dos funciones sin cambiar herramientas
El uso del Dual Quick Changer permitió que ambas pinzas funcionaran dentro de una misma aplicación.
En lugar de detener el proceso para realizar un cambio manual de herramienta, el robot puede utilizar la VGC10 para manipular los recipientes y la RG6 para tomar los dispositivos que se colocarán en su interior.
Esta configuración aporta beneficios directos:
- Reducción de movimientos y cambios manuales.
- Mayor aprovechamiento del robot colaborativo.
- Integración de varias operaciones en una sola celda.
- Disminución de los tiempos de ciclo.
- Mayor flexibilidad frente a productos o tareas diferentes.
La posibilidad de combinar agarre por vacío y agarre mecánico permite resolver procesos que requieren manipular objetos con formas, materiales y dimensiones distintas.
Seguridad y ergonomía como parte del proyecto
El objetivo del proyecto no se limitó al aumento de productividad.
Schneider Electric priorizó la reducción de riesgos y la mejora de la ergonomía de los operarios. Las nuevas aplicaciones colaborativas permitieron automatizar movimientos repetitivos y tareas de manipulación, liberando al personal para actividades de mayor valor y responsabilidad.
La transición se realizó de manera gradual e incluyó una etapa de formación para explicar a los operadores las ventajas de la solución y su impacto en el trabajo cotidiano.
Este enfoque facilitó la adopción tecnológica y permitió que el equipo comprendiera que la automatización no buscaba reemplazar su función, sino reducir la exposición a tareas repetitivas y mejorar las condiciones de la línea.
Resultados: productividad, seguridad y flexibilidad
La incorporación de las soluciones OnRobot permitió mejorar diferentes indicadores de la operación.
Entre los principales resultados se destacan:
- Automatización de procesos que anteriormente eran manuales.
- Mejora de la seguridad y la ergonomía en la línea.
- Mayor productividad en las tareas de manipulación.
- Reducción del espacio requerido frente a soluciones industriales tradicionales.
- Flexibilidad para trabajar con diferentes piezas y recipientes.
- Reasignación de los operarios hacia tareas de mayor valor.
Para Schneider Electric, la viabilidad de una inversión no depende únicamente del retorno económico. La compañía también considera indispensable que la solución cumpla objetivos vinculados con la seguridad y la ergonomía laboral.
Este caso demuestra que la automatización colaborativa puede generar resultados productivos sin separar al robot de las personas ni imponer una infraestructura rígida sobre el proceso existente.
Pinzas robóticas para aplicaciones de pick and place
La combinación de las pinzas RG6 y VGC10 permite abordar aplicaciones donde una única tecnología de agarre no sería suficiente.
Mientras la RG6 aporta flexibilidad para tomar piezas mediante dos dedos, la VGC10 utiliza vacío eléctrico para manipular recipientes, cajas u objetos con superficies compatibles.
Esta complementariedad resulta especialmente útil en procesos como:
- Pick and place.
- Alimentación de líneas.
- Manipulación de componentes.
- Clasificación de productos.
- Carga y descarga de recipientes.
- Packaging y final de línea.
- Mantenimiento de máquinas.
Para las empresas que procesan múltiples referencias o necesitan adaptar sus líneas con frecuencia, una arquitectura modular permite escalar la automatización sin rediseñar toda la aplicación.
Automatización colaborativa aplicada a la industria argentina
El caso de Schneider Electric muestra cómo una solución compacta puede resolver varias tareas de manipulación dentro de una misma celda.
Para la industria argentina, este enfoque permite evaluar proyectos de automatización en los que la productividad debe avanzar junto con la seguridad, la ergonomía y el uso eficiente del espacio.
La correcta selección de la pinza robótica depende del tipo de pieza, el peso, la geometría, la superficie, el tiempo de ciclo y las condiciones del entorno. Por eso, cada aplicación debe analizarse de manera específica antes de definir la combinación de robot y herramienta.
En Murten ayudamos a las empresas a implementar aplicaciones de pick and place y manipulación de materiales con pinzas robóticas OnRobot, integrando soluciones como RG6 y VGC10 según las características de cada proceso.
Completá el formulario y nuestro equipo técnico evaluará qué tecnología de agarre permite mejorar la seguridad, la ergonomía y la productividad de tu línea.
👉 https://murten.com.ar/contacto/


